We begin in this section with a quick introduction to some variational methods.
These ideas will later serve as motivation for the Pontryagin Maximum Principle.
Assume we are given a smooth function L : Rn × Rn → R, L = L(x, v); L is called the Lagrangian. Let T > 0, x0, x1 ∈ Rn be given.
BASIC PROBLEM OF THE CALCULUS OF VARIATIONS. Find a curve x∗(.) : [0, T] → Rn that minimizes the functional
 (1.1)
(1.1)
among all functions x(.) satisfying x(0) = x0 and x(T) = x1.
Now assume x∗(.) solves our variational problem. The fundamental question is this: how can we characterize x∗(.)?
1.1 DERIVATION OF EULER–LAGRANGE EQUATIONS.
NOTATION.We write L = L(x, v), and regard the variable x as denoting position, the variable v as denoting velocity. The partial derivatives of L are

THEOREM 1.1 (EULER–LAGRANGE EQUATIONS). Let x∗(.) solve the calculus of variations problem. Then x∗(.) solves the Euler–Lagrange differential equations:

The significance of preceding theorem is that if we can solve the Euler–Lagrange equations (E-L), then the solution of our original calculus of variations problem (assuming it exists) will be among the solutions.
Note that (E-L) is a quasilinear system of n second–order ODE. The ith component of the system reads

Proof. 1. Select any smooth curve y[0, T] → Rn, satisfying y(0) = y(T) = 0.
Define
i(τ ) := I[x(.) + τy(.)]
for τ ∈ R and x(.) = x∗(.). (To simplify we omit the superscript ∗.) Notice that x(.) + τy(.) takes on the proper values at the endpoints. Hence, since x(.) is
minimizer, we have
i(τ ) ≥ I[x(.)] = i(0).
Consequently i(.) has a minimum at τ = 0, and so i′(0) = 0.
2. We must compute i′ (τ ). Note first that
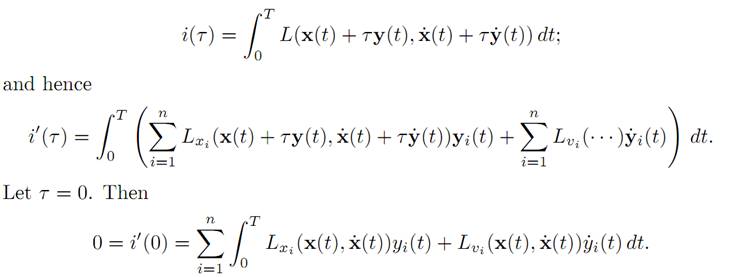
This equality holds for all choices of y : [0, T] → Rn, with y(0) = y(T) = 0.
3. Fix any 1 ≤ j ≤ n. Choose y(.) so that

where ψ is an arbitary function. Use this choice of y(.) above:

Integrate by parts, recalling that ψ(0) = ψ(T) = 0:

This holds for all ψ : [0, T] → R, ψ(0) = ψ(T) = 0 and therefore

for all times 0 ≤ t ≤ T. To see this, observe that otherwise Lxj – d/dt (Lvj ) would be, say, positive on some subinterval on I ⊆ [0, T]. Choose ψ ≡ 0 off I, ψ > 0 on I.
Then
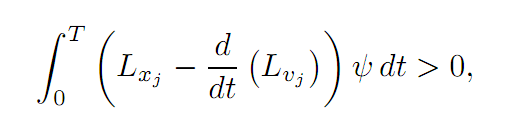
a contradiction.
1.2 CONVERSION TO HAMILTON’S EQUATIONS.
DEFINITION. For the given curve x(.), define
p(t) := ∇vL(x(t), x˙ (t)) (0 ≤ t ≤ T).
We call p(.) the generalized momentum.
Our intention now is to rewrite the Euler–Lagrange equations as a system of first–order ODE for x(.), p(.).
IMPORTANT HYPOTHESIS: Assume that for all x, p ∈ Rn, we can solve the equation
(1.2) p = ∇vL(x, v)
for v in terms of x and p. That is, we suppose we can solve the identity (1.2) for
v = v(x, p).
DEFINITION. Define the dynamical systems Hamiltonian H : Rn × Rn → R by the formula
H(x, p) = p . v(x, p) − L(x, v(x, p)),
where v is defined above.
NOTATION. The partial derivatives of H are

and we write
∇xH := (Hx1 , . . . ,Hxn), ∇pH := (Hp1 , . . . ,Hpn).
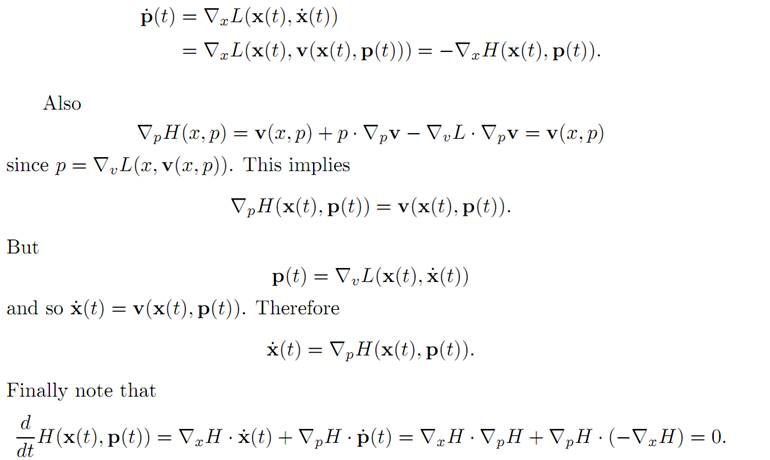
THEOREM 1.2 (HAMILTONIAN DYNAMICS). Let x(.) solve the EulerLagrange equations (E-L) and define p(.)as above. Then the pair (x(.), p(.)) solves Hamilton’s equations:

Furthermore, the mapping t → H(x(t), p(t)) is constant.
Proof. Recall that H(x, p) = p . v(x, p) − L(x, v(x, p)), where v = v(x, p) or, equivalently, p = ∇vL(x, v). Then

because p = ∇vL. Now p(t) = ∇vL(x(t), x˙ (t)) if and only if x˙ (t) = v(x(t), p(t)).
Therefore (E-L) implies
A PHYSICAL EXAMPLE. We define the Lagrangian

which we interpret as the kinetic energy minus the potential energy V . Then
∇xL = −∇V (x), ∇vL = mv.
Therefore the Euler-Lagrange equation is

which is Newton’s law. Furthermore
p = ∇vL(x, v) = mv
is the momentum, and the Hamiltonian is

the sum of the kinetic and potential energies. For this example, Hamilton’s equations read
References
[B-CD] M. Bardi and I. Capuzzo-Dolcetta, Optimal Control and Viscosity Solutions of Hamilton-Jacobi-Bellman Equations, Birkhauser, 1997.
[B-J] N. Barron and R. Jensen, The Pontryagin maximum principle from dynamic programming and viscosity solutions to first-order partial differential equations, Transactions AMS 298 (1986), 635–641.
[C1] F. Clarke, Optimization and Nonsmooth Analysis, Wiley-Interscience, 1983.
[C2] F. Clarke, Methods of Dynamic and Nonsmooth Optimization, CBMS-NSF Regional Conference Series in Applied Mathematics, SIAM, 1989.
[Cr] B. D. Craven, Control and Optimization, Chapman & Hall, 1995.
[E] L. C. Evans, An Introduction to Stochastic Differential Equations, lecture notes avail-able at http://math.berkeley.edu/˜ evans/SDE.course.pdf.
[F-R] W. Fleming and R. Rishel, Deterministic and Stochastic Optimal Control, Springer, 1975.
[F-S] W. Fleming and M. Soner, Controlled Markov Processes and Viscosity Solutions, Springer, 1993.
[H] L. Hocking, Optimal Control: An Introduction to the Theory with Applications, OxfordUniversity Press, 1991.
[I] R. Isaacs, Differential Games: A mathematical theory with applications to warfare and pursuit, control and optimization, Wiley, 1965 (reprinted by Dover in 1999).
[K] G. Knowles, An Introduction to Applied Optimal Control, Academic Press, 1981.
[Kr] N. V. Krylov, Controlled Diffusion Processes, Springer, 1980.
[L-M] E. B. Lee and L. Markus, Foundations of Optimal Control Theory, Wiley, 1967.
[L] J. Lewin, Differential Games: Theory and methods for solving game problems with singular surfaces, Springer, 1994.
[M-S] J. Macki and A. Strauss, Introduction to Optimal Control Theory, Springer, 1982.
[O] B. K. Oksendal, Stochastic Differential Equations: An Introduction with Applications, 4th ed., Springer, 1995.
[O-W] G. Oster and E. O. Wilson, Caste and Ecology in Social Insects, Princeton UniversityPress.
[P-B-G-M] L. S. Pontryagin, V. G. Boltyanski, R. S. Gamkrelidze and E. F. Mishchenko, The Mathematical Theory of Optimal Processes, Interscience, 1962.
[T] William J. Terrell, Some fundamental control theory I: Controllability, observability, and duality, American Math Monthly 106 (1999), 705–719.





















