To illustrate how actually to solve a control problem, in this last section we introduce some ad hoc calculus and geometry methods for the rocket car problem, Example 5 in(EXAMPLES).
First of all, let us guess that to find an optimal solution we will need only to consider the cases a = 1 or a = −1. In other words, we will focus our attention only upon those controls for which at each moment of time either the left or the right rocket engine is fired at full power.
CASE 1: Suppose first that α ≡ 1 for some time interval, during which

And so
Let t0 belong to the time interval where α ≡ 1 and integrate from t0 to t:
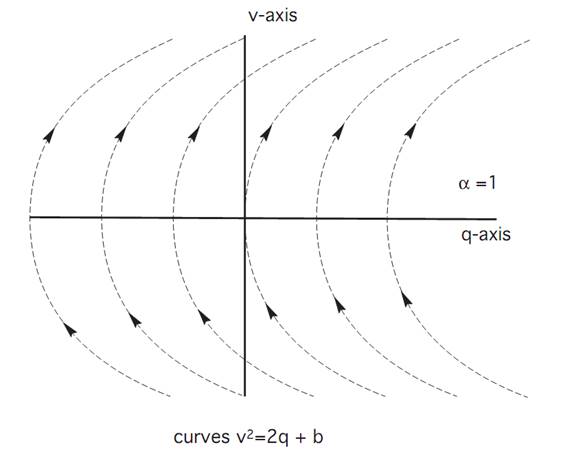
In other words, so long as the control is set for α ≡ 1, the trajectory stays on the curve v2 = 2q + b for some constant b.
CASE 2: Suppose now α ≡ −1 on some time interval. Then as above

And hence
Let t1 belong to an interval where α ≡ −1 and integrate:
Consequently, as long as the control is set for α ≡ −1, the trajectory stays on the curve v2 = −2q + c for some constant c.
GEOMETRIC INTERPRETATION. Formula (1.1) says if α ≡ 1, then (q(t), v(t)) lies on a parabola of the form
v2= 2q + b.
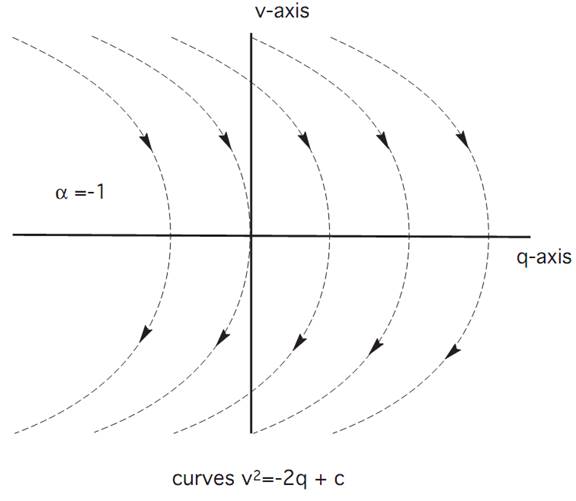
Similarly, (1.2) says if α ≡ −1, then (q(t), v(t)) lies on a parabola
v2= −2q + c.
Now we can design an optimal control α∗(.), which causes the trajectory to jump between the families of right– and left–pointing parabolas, as drawn. Say we start at the black dot, and wish to steer to the origin. This we accomplish by first setting the control to the value α = −1, causing us to move down along the second family of parabolas. We then switch to the control α = 1, and thereupon move to a parabola from the first family, along which we move up and to the left, ending up at the origin. See the picture.
References
[B-CD] M. Bardi and I. Capuzzo-Dolcetta, Optimal Control and Viscosity Solutions of Hamilton-Jacobi-Bellman Equations, Birkhauser, 1997.
[B-J] N. Barron and R. Jensen, The Pontryagin maximum principle from dynamic programming and viscosity solutions to first-order partial differential equations, Transactions AMS 298 (1986), 635–641.
[C1] F. Clarke, Optimization and Nonsmooth Analysis, Wiley-Interscience, 1983.
[C2] F. Clarke, Methods of Dynamic and Nonsmooth Optimization, CBMS-NSF Regional Conference Series in Applied Mathematics, SIAM, 1989.
[Cr] B. D. Craven, Control and Optimization, Chapman & Hall, 1995.
[E] L. C. Evans, An Introduction to Stochastic Differential Equations, lecture notes avail-able at http://math.berkeley.edu/˜ evans/SDE.course.pdf.
[F-R] W. Fleming and R. Rishel, Deterministic and Stochastic Optimal Control, Springer, 1975.
[F-S] W. Fleming and M. Soner, Controlled Markov Processes and Viscosity Solutions, Springer, 1993.
[H] L. Hocking, Optimal Control: An Introduction to the Theory with Applications, OxfordUniversity Press, 1991.
[I] R. Isaacs, Differential Games: A mathematical theory with applications to warfare and pursuit, control and optimization, Wiley, 1965 (reprinted by Dover in 1999).
[K] G. Knowles, An Introduction to Applied Optimal Control, Academic Press, 1981.
[Kr] N. V. Krylov, Controlled Diffusion Processes, Springer, 1980.
[L-M] E. B. Lee and L. Markus, Foundations of Optimal Control Theory, Wiley, 1967.
[L] J. Lewin, Differential Games: Theory and methods for solving game problems with singular surfaces, Springer, 1994.
[M-S] J. Macki and A. Strauss, Introduction to Optimal Control Theory, Springer, 1982.
[O] B. K. Oksendal, Stochastic Differential Equations: An Introduction with Applications, 4th ed., Springer, 1995.
[O-W] G. Oster and E. O. Wilson, Caste and Ecology in Social Insects, Princeton UniversityPress.
[P-B-G-M] L. S. Pontryagin, V. G. Boltyanski, R. S. Gamkrelidze and E. F. Mishchenko, The Mathematical Theory of Optimal Processes, Interscience, 1962.
[T] William J. Terrell, Some fundamental control theory I: Controllability, observability, and duality, American Math Monthly 106 (1999), 705–719.





















