آخر المواضيع المضافة

 تاريخ الرياضيات
الرياضيات في الحضارات المختلفة
الرياضيات المتقطعة
الجبر
الهندسة
المعادلات التفاضلية و التكاملية
التحليل
علماء الرياضيات
تاريخ الرياضيات
الرياضيات في الحضارات المختلفة
الرياضيات المتقطعة
الجبر
الهندسة
المعادلات التفاضلية و التكاملية
التحليل
علماء الرياضيات | THE PONTRYAGIN MAXIMUM PRINCIPLE-MAXIMUM PRINCIPLE WITH STATE CONSTRAINTS |


|
|
Read More
Date: 17-10-2016
Date: 6-10-2016
Date: 8-10-2016
|
We return once again to our usual setting:
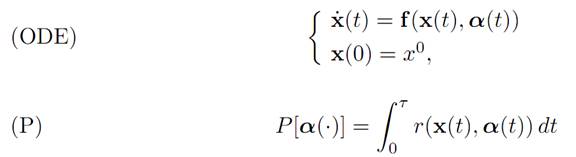
for τ = τ [α(.)], the first time that x(τ ) = x1. This is the fixed endpoint problem.
STATE CONSTRAINTS. We introduce a new complication by asking that our dynamics x(.) must always remain within a given region R ⊂ Rn. We will as above suppose that R has the explicit representation
R = {x ∈ Rn | g(x) ≤ 0}
for a given function g(.) : Rn → R.
DEFINITION. It will be convenient to introduce the quantity
c(x, a) := ∇g(x) .f (x, a).
Notice that
if x(t) ∈ ∂R for times s0 ≤ t ≤ s1, then c(x(t),α(t)) ≡ 0 (s0 ≤ t ≤ s1).
This is so since f is then tangent to ∂R, whereas ∇g is perpendicular.
Then there exists a costate function p∗(.) : [s0, s1] → Rn such that (ODE) holds.
There also exists λ∗(.) : [s0, s1] → R such that for times s0 ≤ t ≤ s1 we have


To keep things simple, we have omitted some technical assumptions really needed for the Theorem to be valid.
REMARKS AND INTERPRETATIONS (i) Let A ⊂ Rm be of this form:
A = {a ∈ Rm | g1(a) ≤ 0, . . . , gs(a) ≤ 0}
for given functions g1, . . . , gs : Rm → R. In this case we can use Lagrange multipliersto deduce from (M′) that

The function λ∗(.) here is that appearing in (ADJ′).
If x∗(t) lies in the interior of R for say the times 0 ≤ t < s0, then the ordinary Maximum Principle holds.
(ii) Jump conditions. In the situation above, we always have
p∗ (s0 − 0) = p∗(s0 + 0),
where s0 is a time that x∗ hits ∂R. In other words, there is no jump in p∗ when we hit the boundary of the constraint ∂R.
However,
p∗ (s1 + 0) = p∗ (s1 − 0) − λ∗ (s1)∇g(x∗ (s1));
this says there is (possibly) a jump in p∗(.) when we leave ∂R.
References
[B-CD] M. Bardi and I. Capuzzo-Dolcetta, Optimal Control and Viscosity Solutions of Hamilton-Jacobi-Bellman Equations, Birkhauser, 1997.
[B-J] N. Barron and R. Jensen, The Pontryagin maximum principle from dynamic programming and viscosity solutions to first-order partial differential equations, Transactions AMS 298 (1986), 635–641.
[C1] F. Clarke, Optimization and Nonsmooth Analysis, Wiley-Interscience, 1983.
[C2] F. Clarke, Methods of Dynamic and Nonsmooth Optimization, CBMS-NSF Regional Conference Series in Applied Mathematics, SIAM, 1989.
[Cr] B. D. Craven, Control and Optimization, Chapman & Hall, 1995.
[E] L. C. Evans, An Introduction to Stochastic Differential Equations, lecture notes avail-able at http://math.berkeley.edu/˜ evans/SDE.course.pdf.
[F-R] W. Fleming and R. Rishel, Deterministic and Stochastic Optimal Control, Springer, 1975.
[F-S] W. Fleming and M. Soner, Controlled Markov Processes and Viscosity Solutions, Springer, 1993.
[H] L. Hocking, Optimal Control: An Introduction to the Theory with Applications, OxfordUniversity Press, 1991.
[I] R. Isaacs, Differential Games: A mathematical theory with applications to warfare and pursuit, control and optimization, Wiley, 1965 (reprinted by Dover in 1999).
[K] G. Knowles, An Introduction to Applied Optimal Control, Academic Press, 1981.
[Kr] N. V. Krylov, Controlled Diffusion Processes, Springer, 1980.
[L-M] E. B. Lee and L. Markus, Foundations of Optimal Control Theory, Wiley, 1967.
[L] J. Lewin, Differential Games: Theory and methods for solving game problems with singular surfaces, Springer, 1994.
[M-S] J. Macki and A. Strauss, Introduction to Optimal Control Theory, Springer, 1982.
[O] B. K. Oksendal, Stochastic Differential Equations: An Introduction with Applications, 4th ed., Springer, 1995.
[O-W] G. Oster and E. O. Wilson, Caste and Ecology in Social Insects, Princeton UniversityPress.
[P-B-G-M] L. S. Pontryagin, V. G. Boltyanski, R. S. Gamkrelidze and E. F. Mishchenko, The Mathematical Theory of Optimal Processes, Interscience, 1962.
[T] William J. Terrell, Some fundamental control theory I: Controllability, observability, and duality, American Math Monthly 106 (1999), 705–719.
|
|
|
|
دخلت غرفة فنسيت ماذا تريد من داخلها.. خبير يفسر الحالة
|
|
|
|
|
|
|
ثورة طبية.. ابتكار أصغر جهاز لتنظيم ضربات القلب في العالم
|
|
|
|
|
|
|
سماحة السيد الصافي يؤكد ضرورة تعريف المجتمعات بأهمية مبادئ أهل البيت (عليهم السلام) في إيجاد حلول للمشاكل الاجتماعية
|
|
|