آخر المواضيع المضافة

 الفيزياء الكلاسيكية
الكهربائية والمغناطيسية
علم البصريات
الفيزياء الحديثة
النظرية النسبية
الفيزياء النووية
فيزياء الحالة الصلبة
الليزر
علم الفلك
المجموعة الشمسية
الطاقة البديلة
الفيزياء والعلوم الأخرى
مواضيع عامة في الفيزياء
الفيزياء الكلاسيكية
الكهربائية والمغناطيسية
علم البصريات
الفيزياء الحديثة
النظرية النسبية
الفيزياء النووية
فيزياء الحالة الصلبة
الليزر
علم الفلك
المجموعة الشمسية
الطاقة البديلة
الفيزياء والعلوم الأخرى
مواضيع عامة في الفيزياء| الحل الهندسي للمعادلة التفاضلية للحركة التوافقية البسيطة، دائرة المرجع |


|
|
أقرأ أيضاً
التاريخ: 16-5-2016
التاريخ: 2024-03-14
التاريخ: 2024-09-30
التاريخ: 13-9-2020
|
يمكن حل المعادلة التفاضلية (معادلة (2–6)) بدون حساب التفاضل باستخدام إنشاء هندسي بسيط. ولأن هدفنا في هذا القسم هو الإحجام عن استخدام حساب التفاضل، فإننا نستبدل ax بدلا من dt2/d2x (قد يبدو الرمز السفلي × غير ضروري لكنه سيساعد في تجنب الالتباس اللاحق) مشكلتنا هي إيجاد حركة جسيم على المحور x، بمعلومية أن العجلة تتناسب مع سالب الإزاحة؛ أي إن:

نتذكر أن الجسيم المتحرك في دائرة نصف قطرها r بمقدار سرعة ثابت v يكون متجه عجلته:

حيث  هو المتجه من مركز الدائرة إلى الموضع اللحظي للجسيم و
هو المتجه من مركز الدائرة إلى الموضع اللحظي للجسيم و هو متجه الوحدة في نفس اتجاه
هو متجه الوحدة في نفس اتجاه  . إذا كانت الدائرة في المستوى x–y، فإن
. إذا كانت الدائرة في المستوى x–y، فإن  وينتج من المعادلة (16–6) أن:
وينتج من المعادلة (16–6) أن:

دعنا نختار v وr بحيث تكون النسبة r/v مساوية لـ ω في المعادلة (15–6)، ولذلك تصبح المعادلة (17–6) مماثلة للمعادلة (15–6). وبما أن v/r هي السرعة الزاوية (وهي الإزاحة الزاوية لوحدة الزمن، مقيسة بوحدة التقدير الدائري لكل ثانية) للجسيم المتحرك حول الدائرة، نرى أن السرعة الزاوية تساوي ω.
ليكن P الموضع اللحظي لجسيمنا على الدائرة، ودعنا نسقط خطًا عموديا من P على المحور x، ليقطع المحور x عند النقطة Q. إذن بما أن عجلة Q على المحور x هي ax، نرى أن حركة Q تحقق المعادلة (15–6). بإيجاز، إذا أُسقطت الحركة الدائرية المنتظمة على خط، تكون الحركة الخطية الناتجة حركة توافقية بسيطة. (الادعاء بأن هذه المناقشة لا تعتمد على حساب التفاضل ليس صحيحًا تمامًا؛ لأن اشتقاق المعادلة (6–16)، المسؤولة عن إنشاء الفرق بين متجهي السرعة عند زمنين قريبين أحدهما على الآخر من بعض والقسمة على الفارق الزمني، هو حساب تفاضل.) تسمى الدائرة دائرة المرجع، وهي بناء رياضياتي صرف.
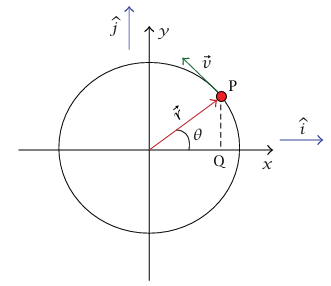
شكل 6–4: صياغة الحل البياني للحركة التوافقية البسيطة.
بالاختيار المناسب لنصف قطر دائرة المرجع والموضع الابتدائي P للجسيم على دائرة المرجع، يمكننا أن نجعل Q تأخذ أي موضع وسرعة ابتدائيين مرغوبين. الإحداثي x لـ P هو r cos θ؛ حيث θ الزاوية بين  والمحور x (انظر الشكل 6–4). إذا كانت قيمة θ عند 0 = t هي δ– (هذا هو تعريف δ) ، وإذا كانت P تتحرك حول الدائرة في عكس اتجاه عقارب الساعة بسرعة زاوية ω؛ فإن δ –θ= ωt ؛ وبالتالي يكون:
والمحور x (انظر الشكل 6–4). إذا كانت قيمة θ عند 0 = t هي δ– (هذا هو تعريف δ) ، وإذا كانت P تتحرك حول الدائرة في عكس اتجاه عقارب الساعة بسرعة زاوية ω؛ فإن δ –θ= ωt ؛ وبالتالي يكون:

سرعة النقطة P تكون في اتجاه المماس للدائرة ومقدارها rω = v. والمركبة × لسرعة P، وهي سرعة Q، تكون (انظر شكل 6–4):

لاحظ أنه كان باستطاعتنا الحصول على المعادلة (19–6) عن طريق تفاضل المعادلة (18–6) بالنسبة إلى الزمن، ولكننا نستخدم الهندسة في هذا القسم وليس حساب التفاضل.
بوضع 0 = t في المعادلتين (18–6) و(19–6) نحصل على x0 = r cos δ وv0 = r ω sin δ (استخدمنا sin (–δ) = –sin (δ), cos (–δ) = cos δ )؛ حيث x0 وv0 الإزاحة والسرعة الابتدائيتان؛ وبالتالي فإن
من المفيد تعليميًّا رسم المنحنى البياني السليم نوعيًّا لكل من x، وvx، وax مقابل t عن طريق تخيل حركة النقطة P على دائرة المرجع. لا بد أن تقارن رسوماتك البيانية مع المعادلتين (18–6) و (19–6) اجعل 0 = t في اللحظة التي عندها x = xmax؛ أي إن θ = 0 ينبغي أن يكون واضحًا أن مقدار السرعة يكون صفرا عند
x = ± xmax ويكون مقدار السرعة أكبر ما يمكن عند 0 = x.



|
|
|
|
دخلت غرفة فنسيت ماذا تريد من داخلها.. خبير يفسر الحالة
|
|
|
|
|
|
|
ثورة طبية.. ابتكار أصغر جهاز لتنظيم ضربات القلب في العالم
|
|
|
|
|
|
|
سماحة السيد الصافي يؤكد ضرورة تعريف المجتمعات بأهمية مبادئ أهل البيت (عليهم السلام) في إيجاد حلول للمشاكل الاجتماعية
|
|
|