آخر المواضيع المضافة

 الفيزياء الكلاسيكية
الكهربائية والمغناطيسية
علم البصريات
الفيزياء الحديثة
النظرية النسبية
الفيزياء النووية
فيزياء الحالة الصلبة
الليزر
علم الفلك
المجموعة الشمسية
الطاقة البديلة
الفيزياء والعلوم الأخرى
مواضيع عامة في الفيزياء
الفيزياء الكلاسيكية
الكهربائية والمغناطيسية
علم البصريات
الفيزياء الحديثة
النظرية النسبية
الفيزياء النووية
فيزياء الحالة الصلبة
الليزر
علم الفلك
المجموعة الشمسية
الطاقة البديلة
الفيزياء والعلوم الأخرى
مواضيع عامة في الفيزياء| The rotation equations using cross products |


|
|
أقرأ أيضاً
التاريخ: 28-12-2016
التاريخ: 2024-09-16
التاريخ: 2024-02-08
التاريخ: 10-3-2021
|
Now let us ask whether any equations in physics can be written using the cross product. The answer, of course, is that a great many equations can be so written. For instance, we see immediately that the torque is equal to the position vector cross the force:

This is a vector summary of the three equations τx=yFz−zFy, etc. By the same token, the angular momentum vector, if there is only one particle present, is the distance from the origin multiplied by the vector momentum:

For three-dimensional space rotation, the dynamical law analogous to the law F=dp/dt of Newton, is that the torque vector is the rate of change with time of the angular momentum vector:

If we sum (20.13) over many particles, the external torque on a system is the rate of change of the total angular momentum:

Another theorem: If the total external torque is zero, then the total vector angular momentum of the system is a constant. This is called the law of conservation of angular momentum. If there is no torque on a given system, its angular momentum cannot change.
What about angular velocity? Is it a vector? We have already discussed turning a solid object about a fixed axis, but for a moment suppose that we are turning it simultaneously about two axes. It might be turning about an axis inside a box, while the box is turning about some other axis. The net result of such combined motions is that the object simply turns about some new axis! The wonderful thing about this new axis is that it can be figured out this way. If the rate of turning in the xy-plane is written as a vector in the z-direction whose length is equal to the rate of rotation in the plane, and if another vector is drawn in the y-direction, say, which is the rate of rotation in the zx-plane, then if we add these together as a vector, the magnitude of the result tells us how fast the object is turning, and the direction tells us in what plane, by the rule of the parallelogram. That is to say, simply, angular velocity is a vector, where we draw the magnitudes of the rotations in the three planes as projections at right angles to those planes.1
As a simple application of the use of the angular velocity vector, we may evaluate the power being expended by the torque acting on a rigid body. The power, of course, is the rate of change of work with time; in three dimensions, the power turns out to be P=τ⋅ω.
All the formulas that we wrote for plane rotation can be generalized to three dimensions. For example, if a rigid body is turning about a certain axis with angular velocity ω, we might ask, “What is the velocity of a point at a certain radial position r?” We shall leave it as a problem for the student to show that the velocity of a particle in a rigid body is given by v=ω×r, where ω is the angular velocity and r is the position. Also, as another example of cross products, we had a formula for Coriolis force, which can also be written using cross products: Fc=2mv×ω. That is, if a particle is moving with velocity v in a coordinate system which is, in fact, rotating with angular velocity ω, and we want to think in terms of the rotating coordinate system, then we have to add the pseudo force Fc.
________________________________________________________
Margin
1- That this is true can be derived by compounding the displacements of the particles of the body during an infinitesimal time Δt. It is not self-evident, and is left to those who are interested to try to figure it out.



|
|
|
|
كل ما تود معرفته عن أهم فيتامين لسلامة الدماغ والأعصاب
|
|
|
|
|
|
|
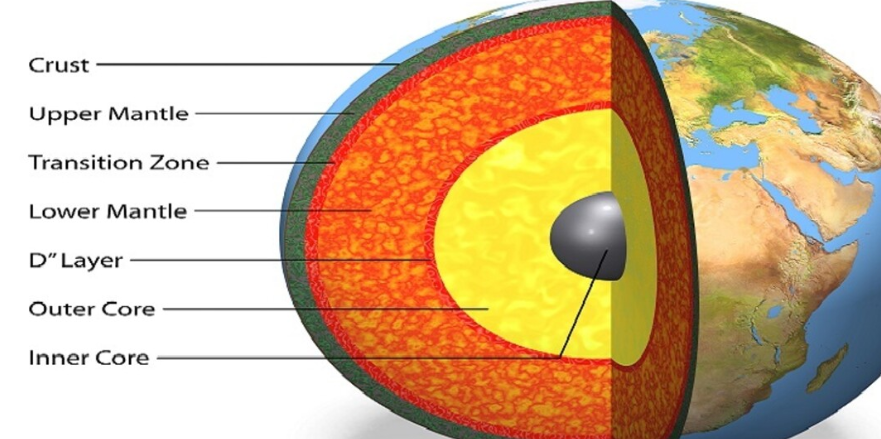
ماذا سيحصل للأرض إذا تغير شكل نواتها؟
|
|
|
|
|
|
|
جامعة الكفيل تناقش تحضيراتها لإطلاق مؤتمرها العلمي الدولي السادس
|
|
|