
آخر المواضيع المضافة

 تاريخ الرياضيات
الرياضيات في الحضارات المختلفة
الرياضيات المتقطعة
الجبر
الهندسة
المعادلات التفاضلية و التكاملية
التحليل
علماء الرياضيات
تاريخ الرياضيات
الرياضيات في الحضارات المختلفة
الرياضيات المتقطعة
الجبر
الهندسة
المعادلات التفاضلية و التكاملية
التحليل
علماء الرياضيات | Nonlinear Least Squares Fitting |


|
|
Read More
Date: 11-2-2021
Date: 22-3-2021
Date: 4-3-2021
|
Given a function  of a variable
of a variable  tabulated at
tabulated at  values
values  , ...,
, ...,  , assume the function is of known analytic form depending on
, assume the function is of known analytic form depending on  parameters
parameters  , and consider the overdetermined set of
, and consider the overdetermined set of  equations
equations
 |
 |
 |
(1) |
 |
 |
 |
(2) |
We desire to solve these equations to obtain the values  , ...,
, ...,  which best satisfy this system of equations. Pick an initial guess for the
which best satisfy this system of equations. Pick an initial guess for the  and then define
and then define
 |
(3) |
Now obtain a linearized estimate for the changes  needed to reduce
needed to reduce  to 0,
to 0,
 |
(4) |
for  , ...,
, ...,  , where
, where  . This can be written in component form as
. This can be written in component form as
 |
(5) |
where  is the
is the  matrix
matrix
![A_(ij)=[(partialf)/(partiallambda_1)|_(x_1,lambda) ... (partialf)/(partiallambda_n)|_(x_1,lambda); (partialf)/(partiallambda_1)|_(x_2,lambda) ... (partialf)/(partiallambda_n)|_(x_2,lambda); | ... |; (partialf)/(partiallambda_1)|_(x_m,lambda) ... (partialf)/(partiallambda_n)|_(x_m,lambda)].](https://mathworld.wolfram.com/images/equations/NonlinearLeastSquaresFitting/NumberedEquation4.gif) |
(6) |
In more concise matrix form,
 |
(7) |
where  is an
is an  -vector and
-vector and  is an
is an  -vector.
-vector.
Applying the transpose of  to both sides gives
to both sides gives
 |
(8) |
Defining
 |
 |
 |
(9) |
 |
 |
 |
(10) |
in terms of the known quantities  and
and  then gives the matrix equation
then gives the matrix equation
 |
(11) |
which can be solved for  using standard matrix techniques such as Gaussian elimination. This offset is then applied to
using standard matrix techniques such as Gaussian elimination. This offset is then applied to  and a new
and a new  is calculated. By iteratively applying this procedure until the elements of
is calculated. By iteratively applying this procedure until the elements of  become smaller than some prescribed limit, a solution is obtained. Note that the procedure may not converge very well for some functions and also that convergence is often greatly improved by picking initial values close to the best-fit value. The sum of square residuals is given by
become smaller than some prescribed limit, a solution is obtained. Note that the procedure may not converge very well for some functions and also that convergence is often greatly improved by picking initial values close to the best-fit value. The sum of square residuals is given by  after the final iteration.
after the final iteration.

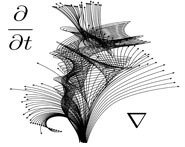
An example of a nonlinear least squares fit to a noisy Gaussian function
 |
(12) |
is shown above, where the thin solid curve is the initial guess, the dotted curves are intermediate iterations, and the heavy solid curve is the fit to which the solution converges. The actual parameters are  , the initial guess was (0.8, 15, 4), and the converged values are (1.03105, 20.1369, 4.86022), with
, the initial guess was (0.8, 15, 4), and the converged values are (1.03105, 20.1369, 4.86022), with  . The partial derivatives used to construct the matrix
. The partial derivatives used to construct the matrix  are
are
 |
 |
 |
(13) |
 |
 |
 |
(14) |
 |
 |
 |
(15) |
The technique could obviously be generalized to multiple Gaussians, to include slopes, etc., although the convergence properties generally worsen as the number of free parameters is increased.
An analogous technique can be used to solve an overdetermined set of equations. This problem might, for example, arise when solving for the best-fit Euler angles corresponding to a noisy rotation matrix, in which case there are three unknown angles, but nine correlated matrix elements. In such a case, write the  different functions as
different functions as  for
for  , ...,
, ...,  , call their actual values
, call their actual values  , and define
, and define
![A=[(partialf_1)/(partiallambda_1)|_(lambda_i) (partialf_1)/(partiallambda_2)|_(lambda_i) ... (partialf_1)/(partiallambda_n)|_(lambda_i); | | ... |; (partialf_m)/(partiallambda_1)|_(lambda_i) (partialf_m)/(partiallambda_2)|_(lambda_i) ... (partialf_m)/(partiallambda_n)|_(lambda_i)],](https://mathworld.wolfram.com/images/equations/NonlinearLeastSquaresFitting/NumberedEquation9.gif) |
(16) |
and
 |
(17) |
where  are the numerical values obtained after the
are the numerical values obtained after the  th iteration. Again, set up the equations as
th iteration. Again, set up the equations as
 |
(18) |
and proceed exactly as before.
REFERENCES:
Bates, D. M. and Watts, D. G. Nonlinear Regression and Its Applications. New York: Wiley, 1988.
|
|
|
|
منها نحت القوام.. ازدياد إقبال الرجال على عمليات التجميل
|
|
|
|
|
|
|
دراسة: الذكاء الاصطناعي يتفوق على البشر في مراقبة القلب
|
|
|
|
|
|
|
هيئة الصحة والتعليم الطبي في العتبة الحسينية تحقق تقدما بارزا في تدريب الكوادر الطبية في العراق
|
|
|
















